Human Interaction
Human Interaction
A demo-first look at natural language, real environments, and unscripted assistance.
PUBLIC DEMO
A conversation, not a script.
Natural language, real environment, no teleoperator, no task-specific pre-training, and no scripted skill set.
Agent with body
A general-purpose agent, connected to a body.
CyberBrain is not just a robot controller. It is a general-purpose LLM/VLM reasoning agent connected to a robotics framework.
Understands people
- Language instructions
- Intent extraction
- Context interpretation
Reasons about environment
- Object state
- Spatial relationships
- Constraints and memory
Acts through the body
- Motion control
- Manipulation
- Navigation and assistance
Learns over time
- Better models
- More robot movement data
- Capability growth
Interaction flow
From Human Instruction to Physical Action.
Example: "Take this empty bottle and throw it away."
1
Human gives instruction
2
Robot identifies the bottle
3
CyberBrain understands it is trash
4
CyberBrain plans a safe grasp
5
Robot moves to the bin
6
Robot throws it away
7
Memory updates context
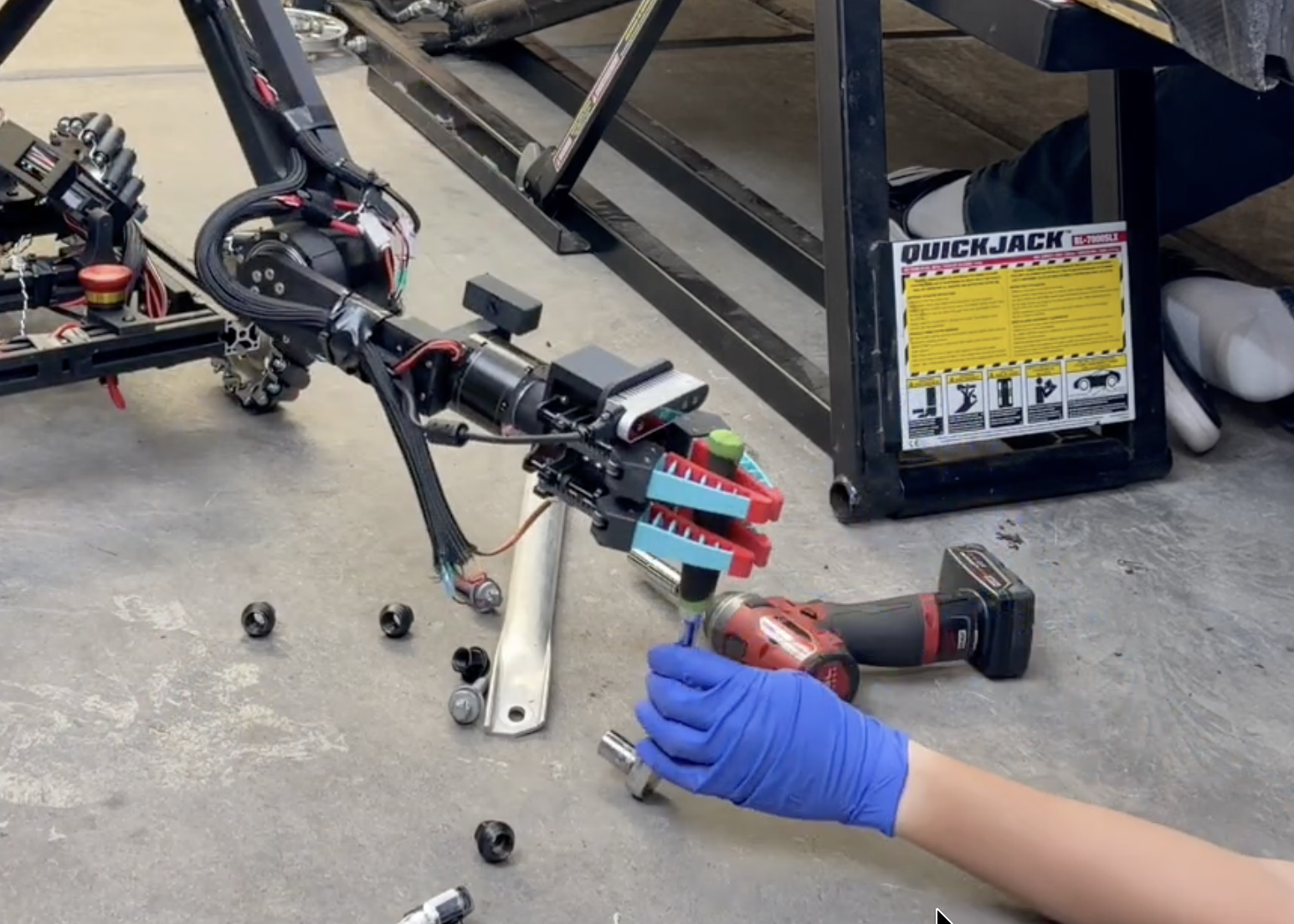
Real-world instruction
An untrained human gives a natural request in a real environment.
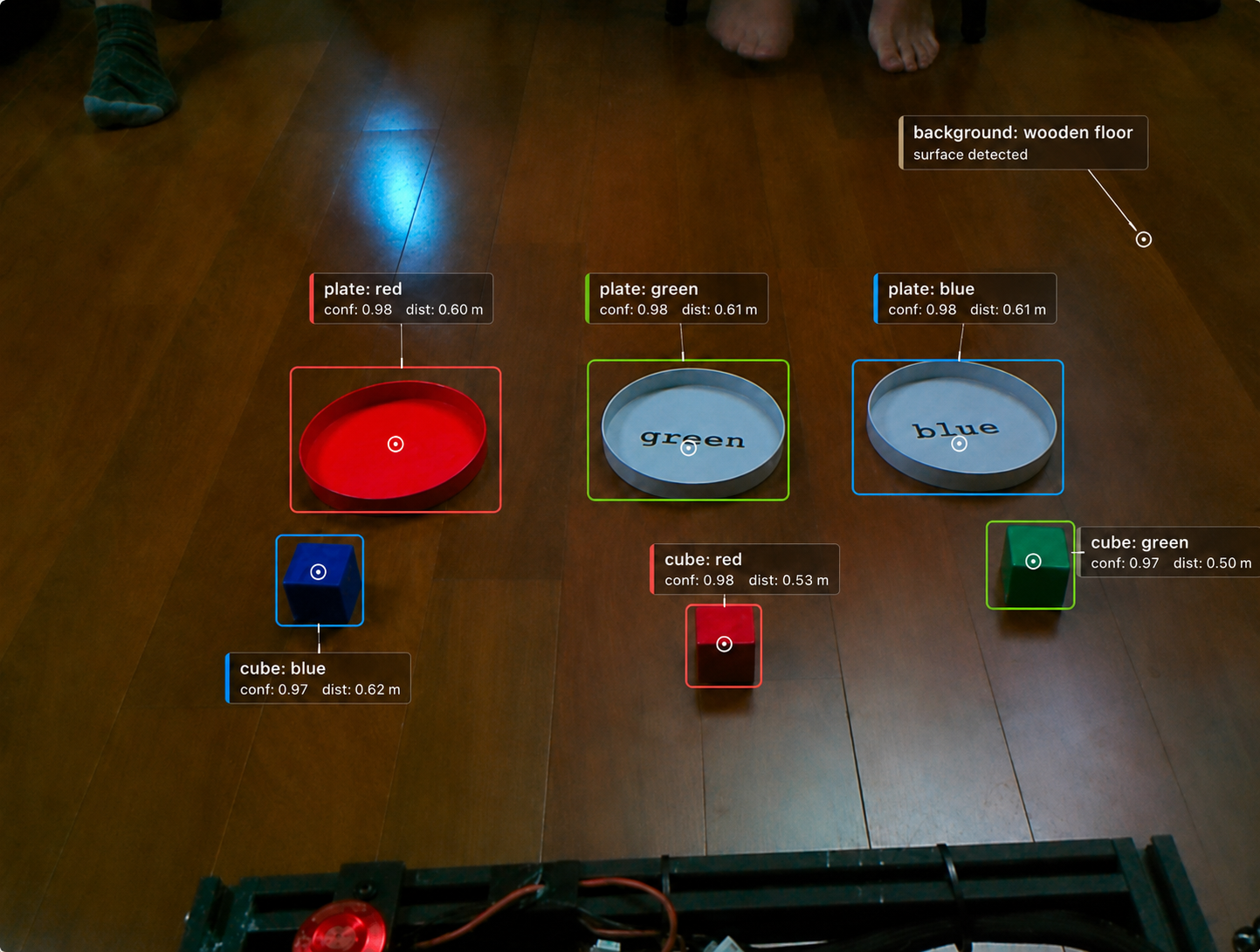
Scene understanding
CyberBrain identifies objects, context, and constraints.
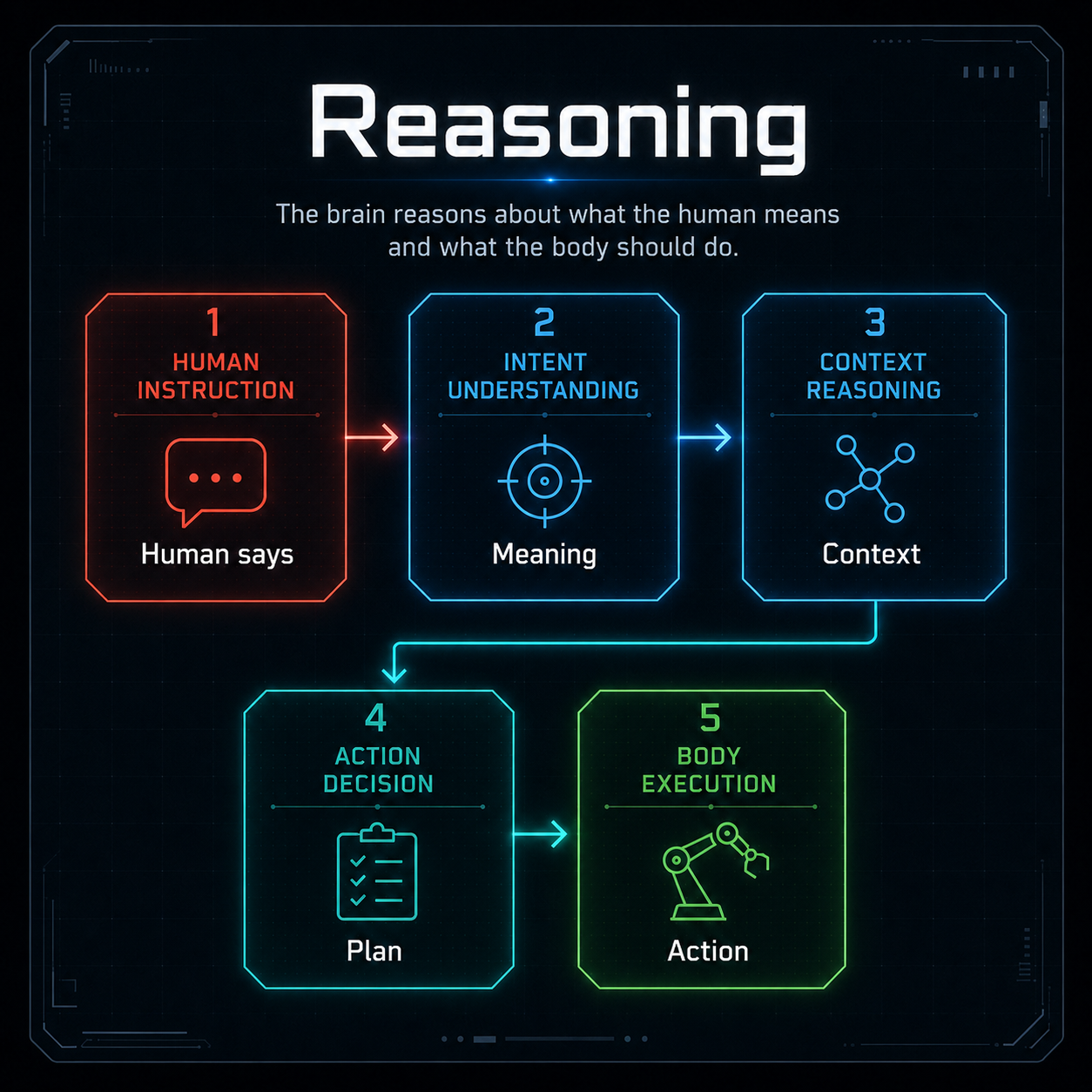
Reasoning
The brain reasons about what the human means and what the body should do.

Physical action
The body moves, grasps, hands over, or assists in the real world.
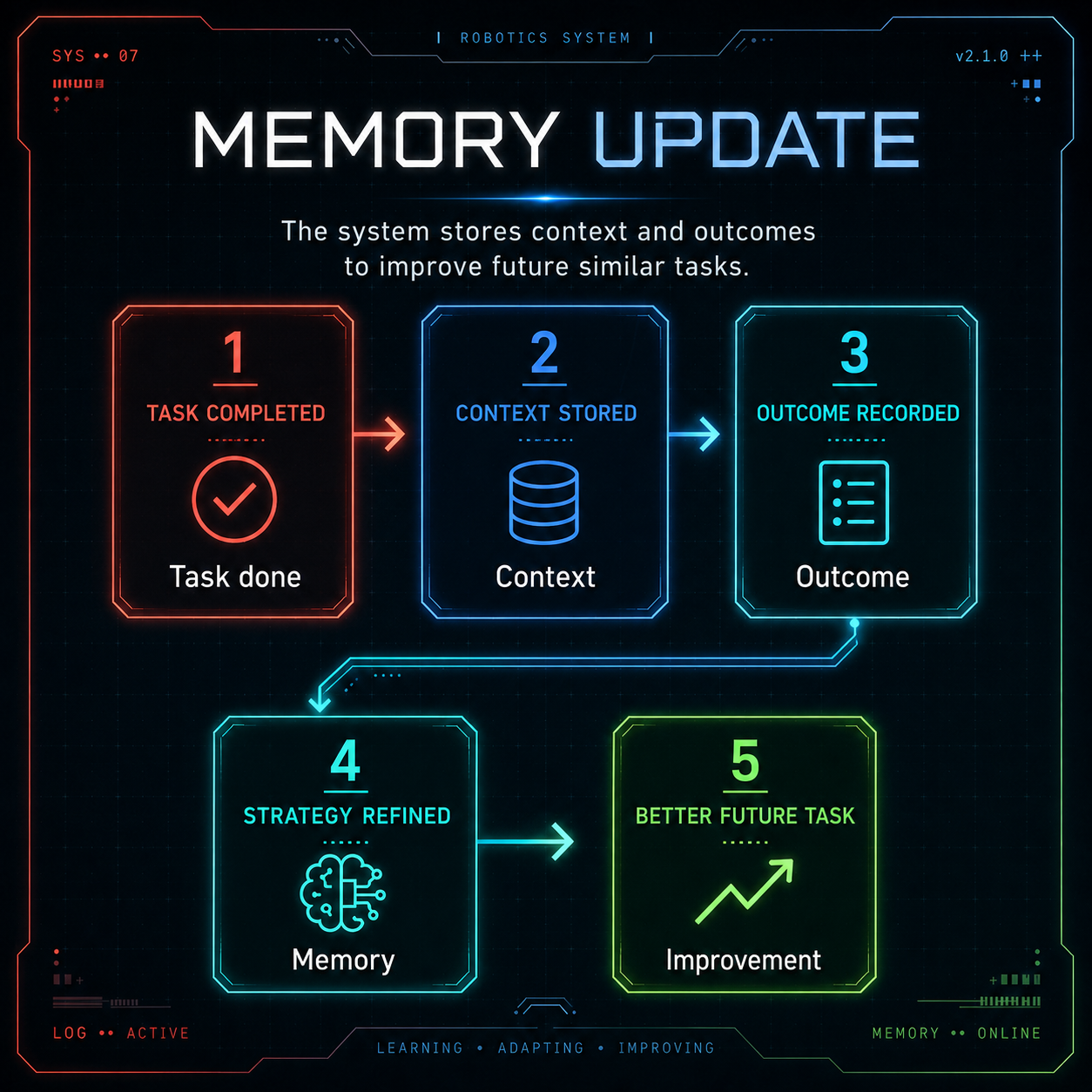
Memory Update
The system stores context and outcomes to improve future similar tasks.
Brain vs action
Train the brain, not the body.
Most systems learn motion patterns. CyberBrain trains language, memory, spatial reasoning, planning, and decision-making, then lets the body execute.
VLA / Action-centric
- learn motion patterns
- depend on task-specific robot data
- struggle with new instructions
- limited reasoning
CyberBrain / Brain-centric
- understands language
- reasons about context
- remembers prior interactions
- plans before acting
- adapts across tasks
Interaction examples
How instructions become embodied tasks.
Household assistance
"Can you bring me the cup on the table?"
Designed to support everyday physical help through natural language.
Bottle disposal
"Take this empty bottle and throw it away."
Shows object understanding, intent reasoning, grasp planning, navigation, and memory update.
Lab support
"Move the sensor kit next to the test platform."
Intended for repeatable technical workflows in research environments.
Elderly support
"Help me pick up what I dropped."
Shows the direction toward safer supportive interaction flows.
Developer demo
"Stack the blocks by color."
Enables quick demos of reasoning + perception + manipulation loops.
Why it matters
Why human interaction changes robotics.
Non-experts can use robots more naturally
Developers do not need to hardcode every task
Human instructions become the interface
Memory enables continuity across interactions
Reasoning enables adaptation in new contexts
Robots move toward assistant-like collaboration over fixed-purpose behavior
Build robots people can actually talk to.
CyberBrain turns embodied AI from isolated control policies into interactive reasoning agents with bodies.